Cornerstone - Autonomous AUV Homing and Localization for UNCLOS
Expanding Canada's Arctic Boundaries
Two projects were developed by Omnitech Electronics Incorporated (OEI) to support Defence Research and Development Canada (DRDC) participation in the Department of Fisheries and Oceans (DFO) effort to create a submission under the United Nations Convention on the Law of the Sea (UNCLOS). This submission was to be created to establish the outer limits of Canada's continental shelf. The two projects were: the Long Range Acoustic Bearing (LRAB) homing system and the Short-Range Localization (SRL) system. Both of these systems were designed to help an Autonomous Underwater Vehicle (AUV) operate in an ice covered environment. Together these systems were referred to as the Acoustic Homing and Localization System (AHLS).
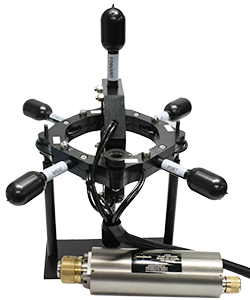
The LRAB is a sensitive acoustic homing and messaging device. The LRAB is composed of a seven-element acoustic receiving array and a self-contained microprocessor both of which are embedded within an AUV. The LRAB allows an AUV to detect a special acoustic signal transmitted from a remote point of interest which may be moving. The LRAB estimates the acoustic signal arrival angle in bearing and elevation and sends steering control messages to the AUV computer. In addition to steering the AUV toward a point of interest, the LRAB can decode the long-range acoustic transmissions allowing simple commands to be transmitted to the AUV. The LRAB has been shown to be capable of operation at ranges of up to 100 km in an Arctic Ocean environment. The LRAB was initially developed for the large Arctic Explorer AUVs built by International Submarine Engineering (ISE). Since the initial LRAB was designed a smaller version has been developed that is suitable for six-inch diameter and larger AUV.
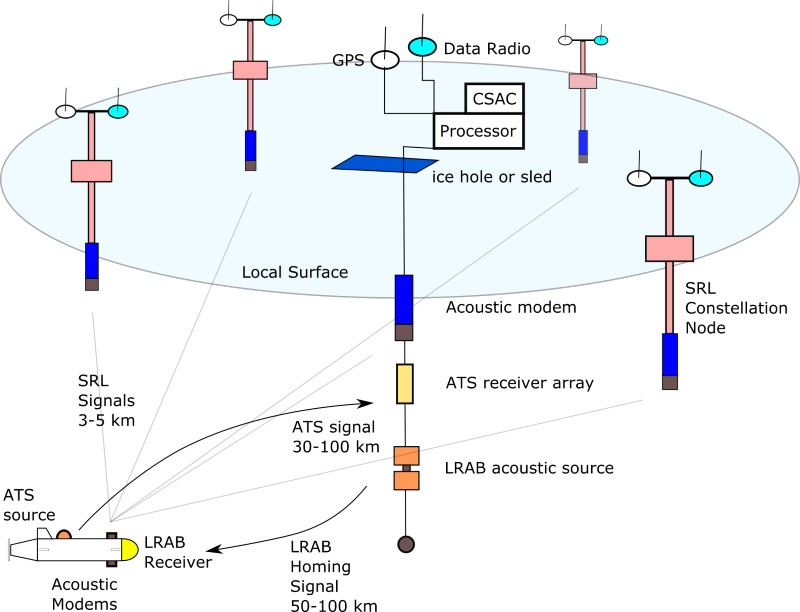
The SRL is a high-accuracy 3D AUV localization system. SRL is composed of an AUV-mounted acoustic modem, a processor, and a number of distributed acoustic modems suspended from the ice cover or from the ocean surface. SRL is based on modem signal propagation times along with optimized modem field location estimation through real-time GPS. This near real-time optimization of the modem field allows the individual modems to be freely moving on drifting pack ice or on surface buoys. SRL employs immediate localization updates, dead-reckoning navigation, and short-term history of received transmissions to achieve excellent localization accuracy even when some modems are not communicating with the AUV for every query. SRL was originally intended to provide a means of updating an AUV inertial navigation system (INS) after long ascent- or descent-times where a Doppler Velocity Log (DVL) lock on the surface or bottom is not possible. The SRL system also provides high-accuracy 3D localization and can provide precise navigation to recovery or docking sites.
A third system called the Acoustic Tracking System (ATS) was also developed to assist with long endurance AUV missions. ATS was developed later in the UNCLOS effort and was intended to provide long-range state monitoring of the AUV and an ability to approximately localize the vehicle as it conducted operations well beyond acoustic modem range. ATS has seen limited operational usage, but it was demonstrated to be very capable and is an essential third part of the AHLS capability.
The Big Picture
LRAB allows an AUV to locate a moving docking base without operator assistance from ranges of up to 100 km in moderate noise conditions. LRAB also allows the operator to send simple commands to long ranges that can change the state of the AUV.
ATS allows the operator to localize the vehicle at long ranges and receive simple AUV state messages. This grants greater comfort and operational intelligence when an AUV is operating at risk on a long mission. The long range localization also enables a more rapid response if something does go wrong and is highly beneficial in searching for the AUV.
SRL has the potential for highly accurate navigation over ranges less than 5 km and could be used to update the vehicle INS.
Each of these three systems can be further developed and improved, but as they stand, they provide unparalleled capability to an autonomous vehicle.
Moving Targets
Two ISE Arctic Explorer AUV were acquired for the Canadian UNCLOS data collection effort. The AUVs were used to gather hydrographic quality bathymetric data of the seabed under the ice in Canada’s Arctic Ocean 1.
In 2010, in order to collect bathymetric data in a logistically difficult region of the Arctic, a Main Camp was established on the land-locked ice in the protected strait south of Borden Island, NWT, while a second smaller Remote Camp was built on the drifting ice near the Sever Spur.
An AUV was launched from the Main Camp and collected bathymetric data while travelling to the Remote Camp. The journey from the Main Camp to the remote camp took approximately three days. The AUV had to find the Remote Camp without operator assistance. At the Remote Camp, the AUV remained underwater while downloading data and being recharged. The AUV was then sent further north to examine the bathymetry in the rugged Sever Spur region. Three days later the AUV searched for and returned to the Remote Camp once again, downloaded data, and recharged while beneath the ice sheet. Finally, the AUV was instructed to return to the Main Camp where it was recovered.
During the 2010 mission, the AUV remained underwater for 12 consecutive days, travelled almost 1000 km, and was recharged three times all in a single mission2. Communication with the AUV was only possible via acoustic modems for short distances generally less than 10 km. The vehicle had to operate completely autonomously except in the initial launch and final capture stages.
In the years since, the AUVs have been in operation with highly successful mission outcomes, including operations in the vicinity of the geographic North Pole.

Returning Home

Since the 2010 Remote Camp was on randomly drifting ice, the AUV had to locate the Remote Camp nearing the end of each mission without human assistance. During each three-day long survey mission, it was potentially possible for the Remote Camp to drift as far as 60 km implying a very large area for the potential camp location. With small battery energy safety factors, the AUV could not afford to run an extensive search for the camp.
There was no communication with the AUV during the survey missions so the LRAB homing system was essential to the success of these operations. The AUV was preprogrammed to return to an estimated Remote Camp location. When the AUV was within 50 km distance of the estimated location, the LRAB system was activated and once a camp beacon signal detection was made the LRAB issued course instructions to the AUV to approach the acoustic projector at the Remote Camp. This sequence of operations was successfully repeated for each leg of the mission during the 2010 deployment and in several more missions since.
The LRAB system was incredibly effective. It was capable of determining the acoustic arrival direction to within 1-degree in both bearing and elevation. In fact, with the AUV instructed to remain at a specific depth of 2500 m, the LRAB kept the AUV within a 200-m diameter circular path beneath the Remote Camp. The AUV was actually observed to follow the Remote Camp as it drifted with the ice prior to the AUV surfacing.
Short Range Localization
For the 2010 UNCLOS mission, the AUV was initially expected to be deployed from drifting ice at a deep water location. The descent from the ice surface to a depth of approximately 2500 m could take several hours during which time the INS could drift without the advantage of a bottom-lock or velocity correction. There was concern that the high-latitude location could exacerbate the INS drift. The planning team was concerned that the result would be that the INS would accumulate too much position error for accurate hydrographic purposes.
During the development period prior to the actual field trial a state-of-the-art ultra-short baseline localization sensor was installed on the AUV for testing alongside the OEI SRL. It was determined that ultra-short baseline system had a usable range of 1-2 kilometers at best, while SRL was capable of much greater ranges; therefore, this custom localization solution was deployed during the 2010 field trial.
SRL was deployed and tested, but it was not necessary to update the INS during the 2010 trial as the selected deployment location was from land-locked ice in the shallow water of a protected strait rather than from the moving ice in deep water. The AUV essentially maintained bottom-lock with a minimal system drift throughout the deployment process.
SRL was used to track the AUV during work-up testing prior to the long mission. SRL was also used to track the AUV in deep water near the bottom at the Remote Camp while running in a holding pattern prior to the begin mission orders. SRL was also used to track the AUV return and the AUV path near the bottom while circling around the far-overhead, shallow-deployed, homing signal projector prior to the orders to surface.
In 2010, SRL was not required as a navigation aid to return the AUV to either of the Remote Camp or Main Camp locations as the LRAB homing system worked so well. With acoustic modem telemetry and control, it was possible to bring the AUV to the ice immediately beside the camp without employing the SRL solution, but the tracking of the AUV with SRL prior to the 'surface' command did provide the assurance and risk awareness.

The AUV can execute the 'short-range-localization' (SRL) routine whenever a position update is required. An error minimization routine accounts for vehicle motion, distance, and the speed of sound. SRL has achieved map (earth) referenced position accuracy matching the reference GPS RMS error of 3-5 meters and has a range of ~5 km2.
Extensive Southern Trials
Canada had only one chance to collect bathymetric data from the Arctic with the AUV before the UNCLOS submission deadline in 2013. The project risks were high and the consequences of vehicle loss or data loss would weaken Canada's claim to large economic zones in the north. Therefore, ISE, DRDC, and Omnitech Electronics Inc. conducted months of system trials and validation testing. Our engineers spent over one month at three locations in British Columbia testing LRAB and the short-range-localization performance and reliability.
Additional tests were conducted in Bedford Basin and from a Coast Guard vessel operating near Newfoundland. Excellent results were obtained in all test environments. The entire development process of the LRAB and SRL was completed in just 10 months. It was a driven process with considerable pressure to obtain a highly performing system.
Updated for Even Deeper Operation
Omnitech Electronics updated the LRAB hydrophone array in 2015 to support planned vehicle deployments in deeper water. The LRAB-2465 uses modified PZT ceramics and titanium end caps and is rated for use down to 5000 m depth. LRAB-2465 has the same acoustic sensitivity and range as the original model and is now the standard product configuration.
Added State Messaging
After the UNCLOS effort, the Explorer AUVs were used in additional Arctic trials under pack-ice. For these trials, the customer wanted a reliable method to change the mission mode of vehicle while a long-range survey was in process.
The vehicles have acoustic modems but on long missions with changing pack ice, the support vessel cannot always be in acoustic modem range, which is generally limited to less than 10 km. For these missions, Omnitech Electronics added messaging or command state codes that can be embedded in the long-range homing beacon. LRAB will receive the beacon with an embedded message and send the mission code to the vehicle control computer along with the homing bearing. The codes can be used to signal changes to the mission, such as, return to base, hold location, emergency surface, etc. These message codes function over the full range of the homing system and allow operating vehicles from distances much greater than traditional acoustic communication devices.
AUV Tracking System Development
The LRAB homing and messaging system provides a connection between the distant AUV and the camp operators. However, it is a one-way connection from the camp to the AUV. It allows for a change in vehicle operating mode and allows the vehicle to return to the camp, but the operators have to wait until the AUV is close to the camp for acoustic modem connectivity. The waiting period on long missions can extend to a couple of days before the state of the vehicle is known.
A third AUV system was developed in the latter stages of the UNCLOS work. This system was named the Acoustic Tracking System (ATS). The ATS includes an acoustic transducer, a power amplifier, Chip-Scale Atomic Clock (CSAC), and a small processor all embedded within the AUV. At a camp, or on an ice-breaker vessel, the system includes a dry-end processor, a second CSAC, and a small seven-element acoustic receiving array with 3D orientation sensor.
The ATS allows the AUV to report its approximate position and operational state through a brief acoustic pulse emitted at high power from the AUV. The pulse transmission and reception times are accurately known due to the synchronized CSAC devices. Pulse schedules are pre-programmed at a low duty cycle and together with their short duration account for only a small load on the vehicle energy reserve. For long range operations perhaps only one, one-second duration pulse every one to four hours will be employed. At shorter ranges more frequent pulses will provide more frequent reports.
Vehicle state is communicated by features of the transmitted programmable pulse, which to date has generally been an FM sweep from 6--7 kHz. The vehicle range is roughly provided by the time difference between the known transmission time and the estimated reception time. Finally, the approximate AUV location is obtained by estimating the bearing and elevation of the received acoustic transmission and back-propagating the signal with the aid of an acoustic model to the transmission point. Bearing and elevation angles are improved by the use of the orientation sensor, which allows for array motion when operated from a vessel.

The ATS was originally intended to operate in a high background noise field produced by an ice breaker moving in ice. The high noise levels were expected to impact the maximum achievable ranges, which were predicted to be on the order of 30 km. Operations from a fixed or drifting ice camp would result in much greater ranges due to greatly reduced background noise levels. Indications are that a 60 km range may be achievable in moderate to high noise conditions with greater ranges in quiet conditions.
Since ATS was developed late in the program, it never saw extended operations; however, it was tested at short ranges in shallow water (where the localization would be least accurate) with very good results. ATS was also given one cursory test during an AUV mission near the geographic North Pole. The system was allowed to emit two successive pulses a few minutes apart at a range of approximately 15 km from the recovery ice breaker vessel. The system functioned properly and showed the vehicle on the expected bearing and closing in range at an appropriate rate.